寻路系统
因为客户端使用的Unity,因此服务器寻路系统和客户端保持一致采用导航网格和A*算法实现。
寻路方式
多边形寻路参考PolygonNavMesh 原理:
- 将unity导出的数据生成凸多边形
- 找出所有凸多边形共享的边
- 使用A*算法找出起点到目标点所经过的多边形列表
- 使用漏斗算法找出顶点坐标
导航网格
导航网格是一系列的凸多边形相连的网格,比路点拥有更少的数据存储,可方便实现分层寻路系统。
Unity导出NavMesh
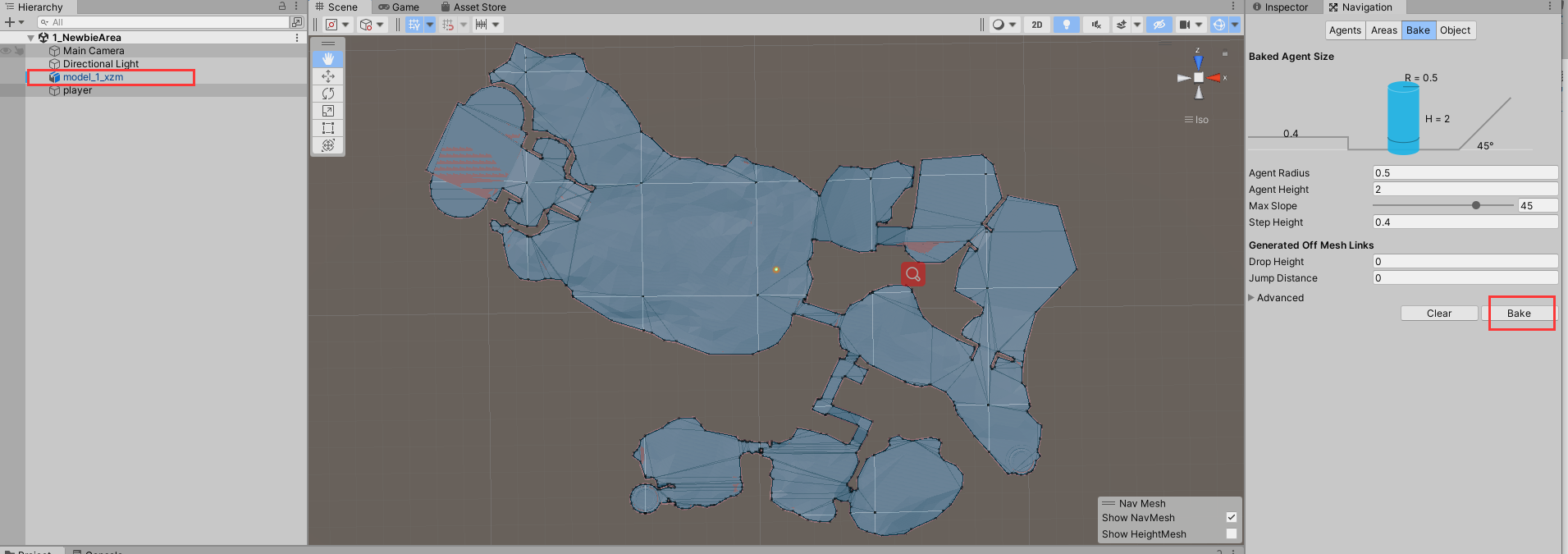
Unity导出NavMesh首先需在场景中烘培出寻路层NavMesh,因为服务器寻路精度要求没有客户端要求高, 因此在烘培NavMesh时并未使用关卡几何体对象进行烘培,而是美工制作了一个行走面片进行烘培,这样能有效减少导航网格的凸多边形个数,提升性能。 其次需要注意Unity是左手坐标系,服务器是基于gdx-ai 的右手坐标系,因此导出时需要将y坐标取反。 最后需要特别注意Unity生成的相邻的凸多边形顶点可能共边不共顶点,服务器创建邻接关系是需要判断是否相连。 Unity NavMesh导出工具参考NavMeshDemo ,具体步骤如下:
-
选中model_1_xzm,然后在Navigation中烘培行走层对象
-
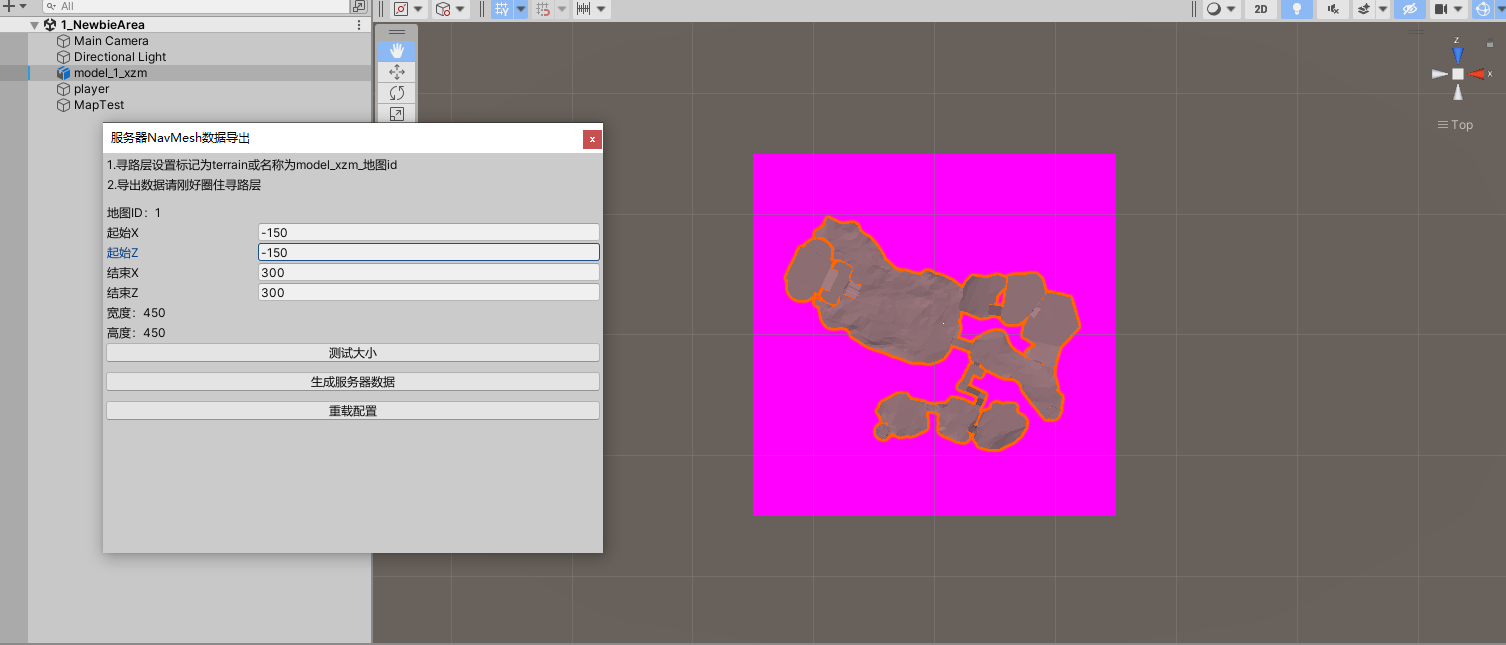
选择工具-导出服务器NavMesh,点击测试地图大小,修改地图范围
-
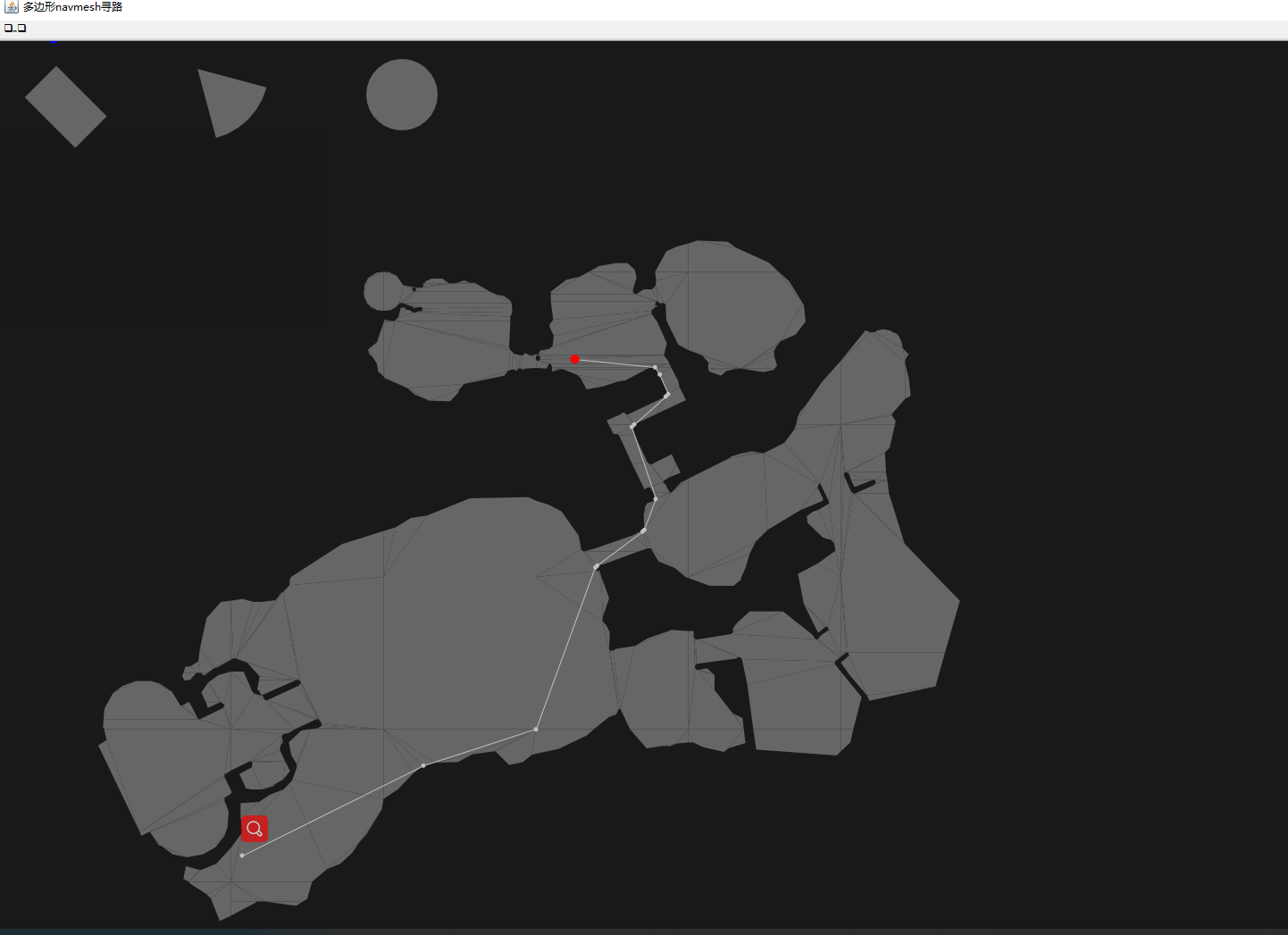
点击生成NavMesh数据,将生成的json文本导入服务器寻路工具 查看
总结
- 多边形寻路和三角形寻路由于原理相同,性能消耗差不多,由于多边形合并了三角形,速度稍微快一些;顶点寻路相比于多边形寻路慢了5~40倍
- 多边形寻路需要导出的寻路数据在行走层中没有额外的顶点,共边顶点坐标需要一致,顶点寻路由于由于采用阻挡区三角形顶点寻路,因此没有此限制,但是增加了额外的阻挡区数据
- 多边形寻路支持3D寻路,顶点寻路只能平面寻路